Для создания проекта был выбран микроконтроллер Arduino UNO потому что это полноценная система, позволяющая управлять различными системами и считывать данные из разных источников. Основное преимущество Arduino UNO — это стандартизированное распределение выводов, позволяющее применять готовые к использованию решения, расширяющие возможности системы. Используя специальные платы, называемые шилдами (Shield), можно расширить возможности Arduino, подключив, например, сетевую карту, драйвер для управления шаговым двигателем или датчик расстояния. Со стороны программы каждый вывод схемы четко определен, что в свою очередь позволяет легко создавать собственные макеты на основе примеров.

Элементная база для построения робота





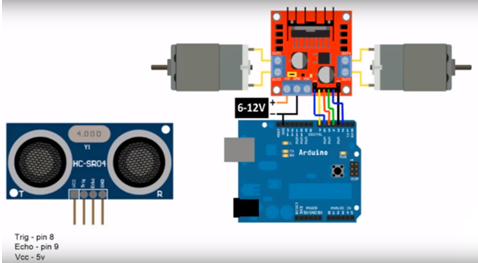
Схема соединений элементов роботизированной платформы:
Этапы сборки робота



Результат сборки

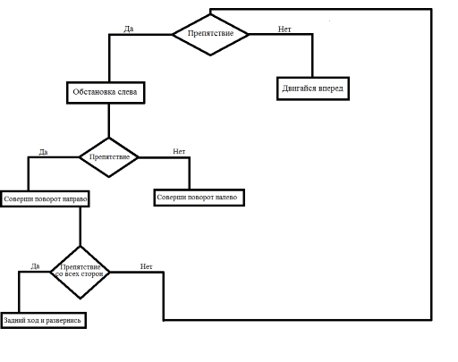
Разработка программы управления. Зная характеристики и возможности робота, мы можем составить схему поведения робота:
- робот должен ехать прямо, пока не увидит препятствие
- увидев препятствие, он должен оглядеться и определить оптимальный маршрут (поехать в ту сторону, где помеха находятся дальше или отсутствует)
- если препятствие оказалось слишком близко, робот по каким либо причинам его не заметил его (слабая отражающая способность, крохотная преграда, или робот подъезжал к нему под таким углом, что звук просто не мог отразиться обратно) – необходимо отъехать назад и дальше следовать второму пункту данного алгоритма
- после завершения маневра ехать по прямой линии до следующей преграды
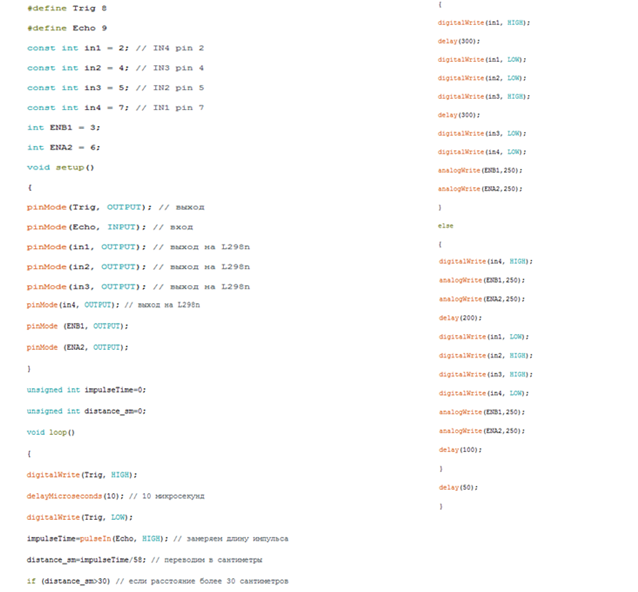
Скетч программы управления